Water Monitoring with autonomous robotic boats

Build and test various high level control and coordination techniques for autonomous robotic boats for monitoring water conditions in lakes and rivers. This is the main research focus of the INTCATCH H2020 project.
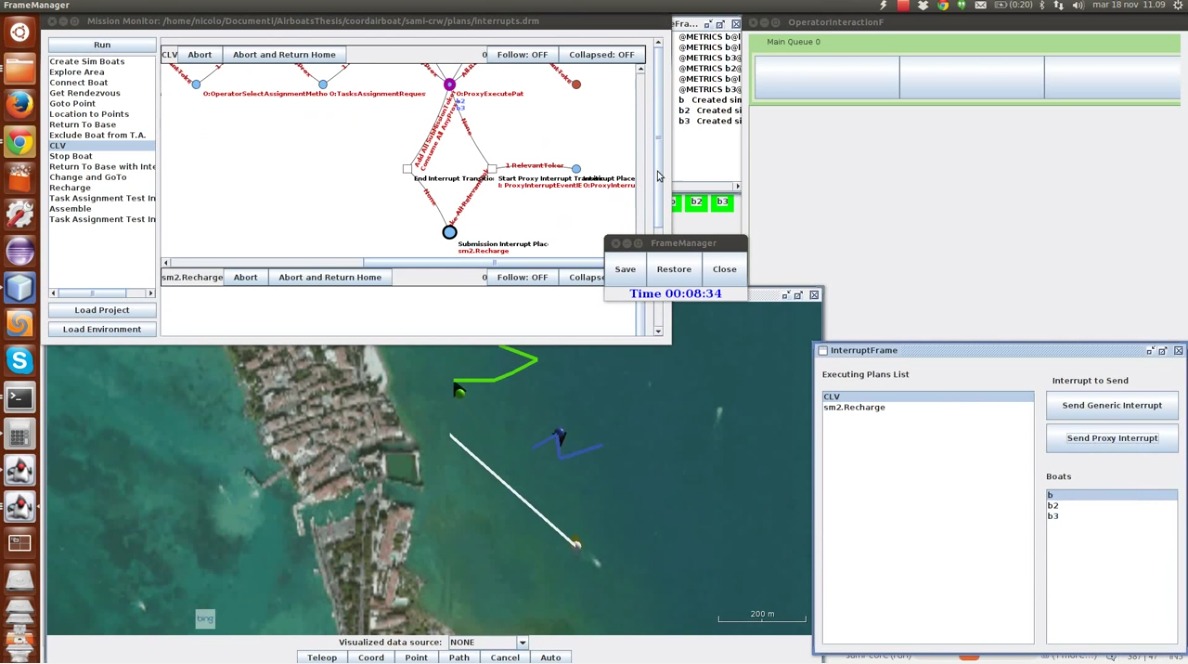
Possible topics: i) intelligent exploration implementation and evaluation of approaches for intelligent water sampling; ii) HRI study of Human Robot Interaction approaches for controlling a team of autonomous boats;
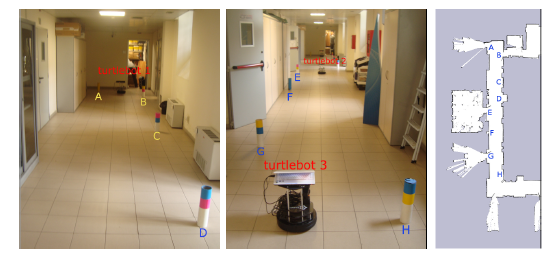
Situation Awareness and Safe Navigation for Drones
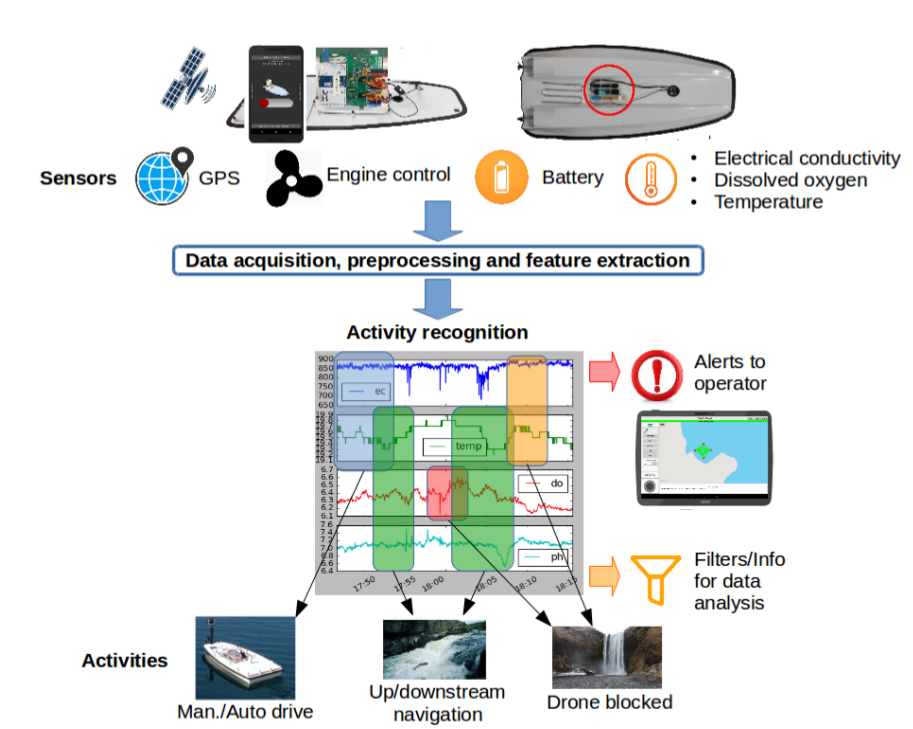
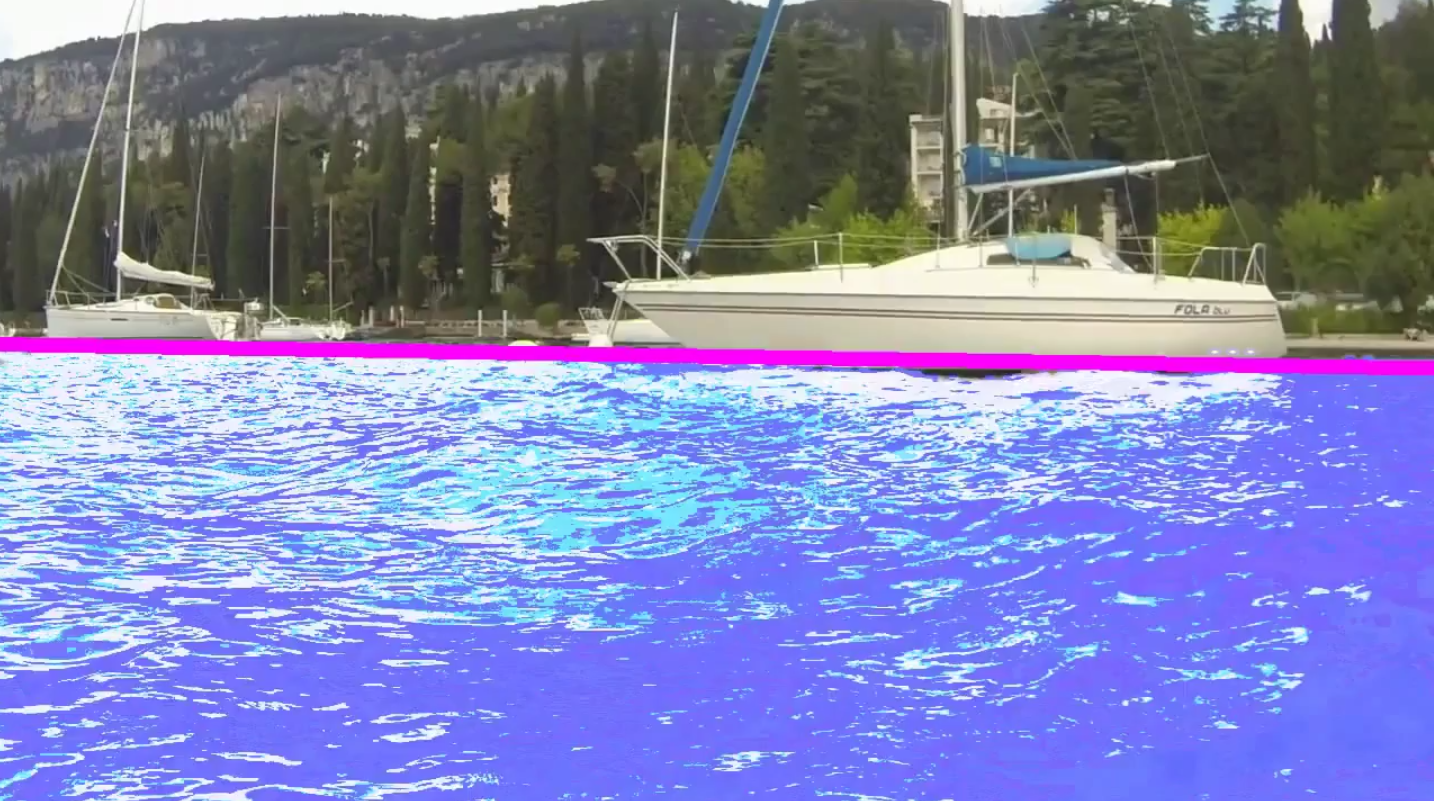
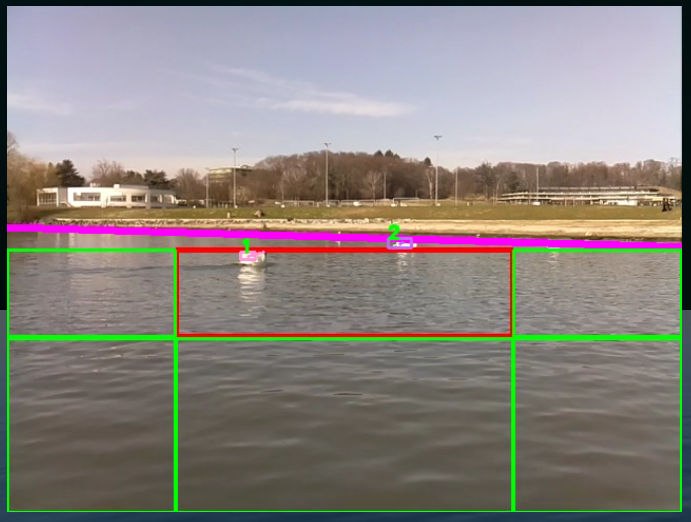
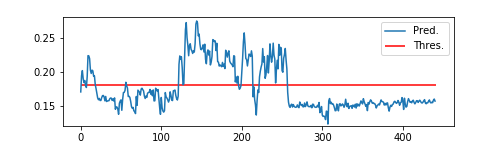
Possible topics: i) Situation Awareness analyse data (typically time-series) to understand what is the current situation for the drones. An example is to decide whether a water drone is moving upstream or downstream. ii) Vision based situation awareness analyse data from cameras mounted on a drone to acquire high level information on the surrounding environment. An example is to detect the coastline for a water drone so to enchance autonomous navigation. iii) Safe navigation find the best possible action given data received from sensors. An example is to decide whether the drone should stop (or deviate from current trajectories) to avoid an obstacle. More information on algorithms, datasets and publications on these research lines can be found to the INTCATCH AI web page.
Planning under uncertainty and Explainable Planning for Robotic Systems
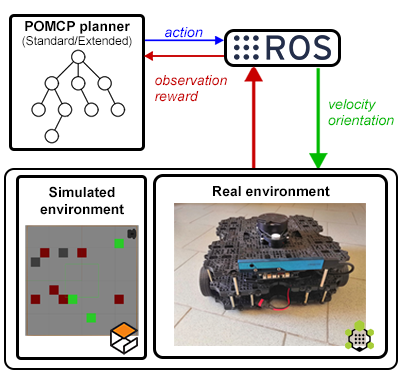

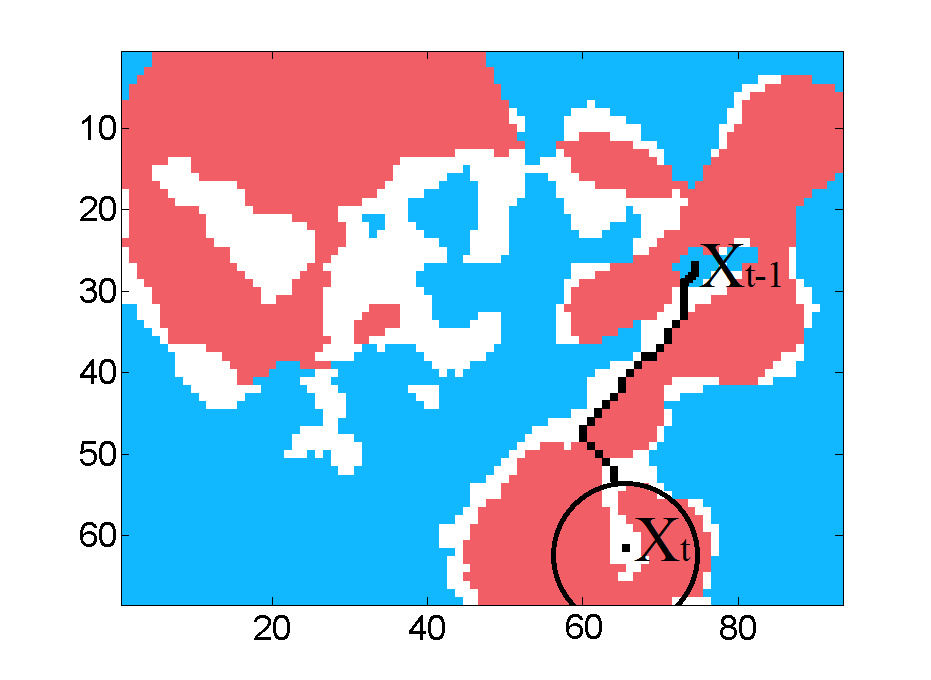
Possible topics in this area: i) Planning under uncertainty: find the best possible action given data received from sensors. An example is to decide the speed that a drone should maintain to make sure it will reach the end of a given path with enough battery. Possible techniques include Markov Decision Processes (MDPs), Partialy Observable MDPs, Monta Carlo methods. ii) Explainable planning: devise methods to explain to a human user the decision of an artificial intelligent system is a key requirement for modern AI. Applying this concept to robotic systems is extremely challenging beacuse one must handle the inherent complexity and uncertainty typical of these systems. Possible techniques include logic based methods to planning and decision making (e.g., Satifiability Modulo Theory, Answer Set Programming, etc.).
Machine learning approaches for Malware analysis and Robot Security
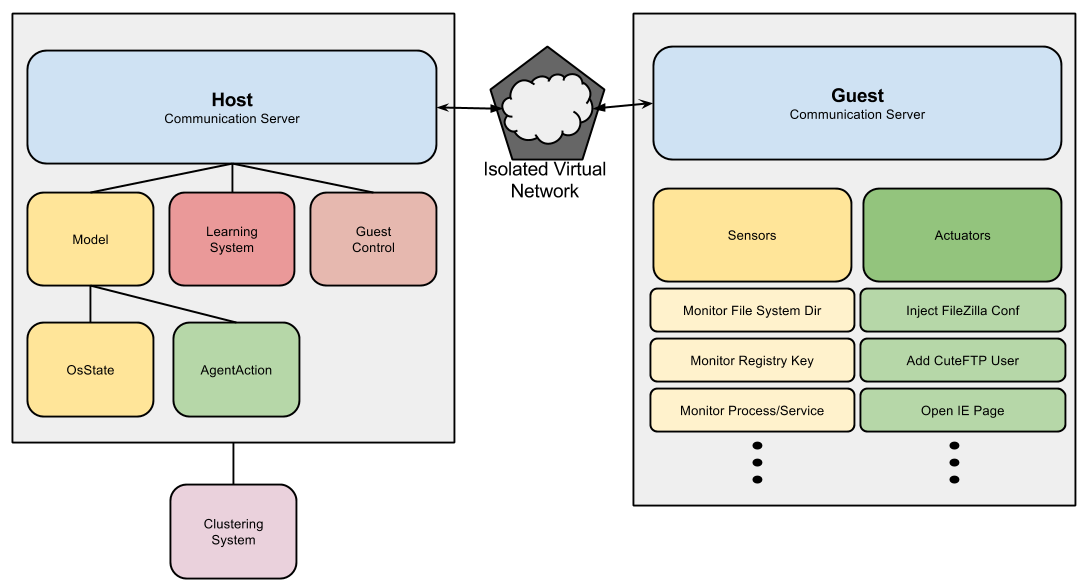
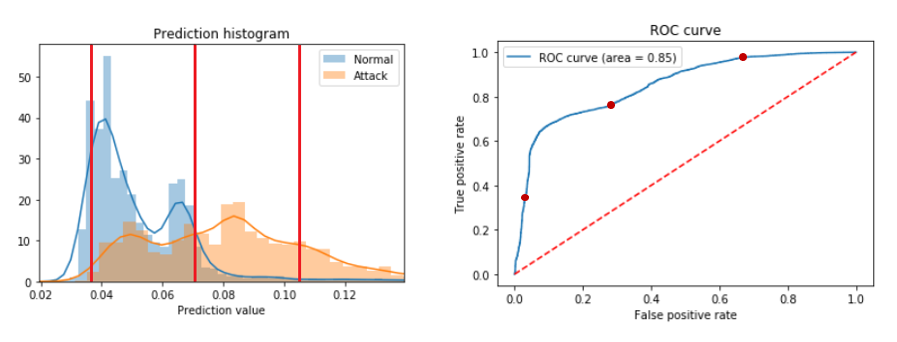
Robotic Systems can be compromised by cyberattacks. An example is what happened to Chrysler in 2015, when it announced the recall of about 1.4m cars and trucks in the US due to vulnerabilities, which were exploited to get remote control of vehicles. Possible ideas for projects in this area: i) Study security problems related to malicious attacks that can alter the behaviour of the robot (e.g., GPS spoofing, reply attack, man-in-the-middle attack, and DoS attack). Address the problem as an anomaly detection problem where the system must recognize anomalous behavior using statistical machine learning approaches. Possible techniques include Hidden Markov Models, Artificial Neural Networks (RNN, LSTM, GAN, etc.). ii) Perform active malware analysis by using reinforcement learning approaches that interact with the malware in a sandbox. Design action selection strategies to learn malware models representing behaviors triggered by specific actions on the infected system. Compare learned models with machine learning approaches (e.g. clustering, classification etc...)
Deep Reinforcement Learning for Robotic Systems
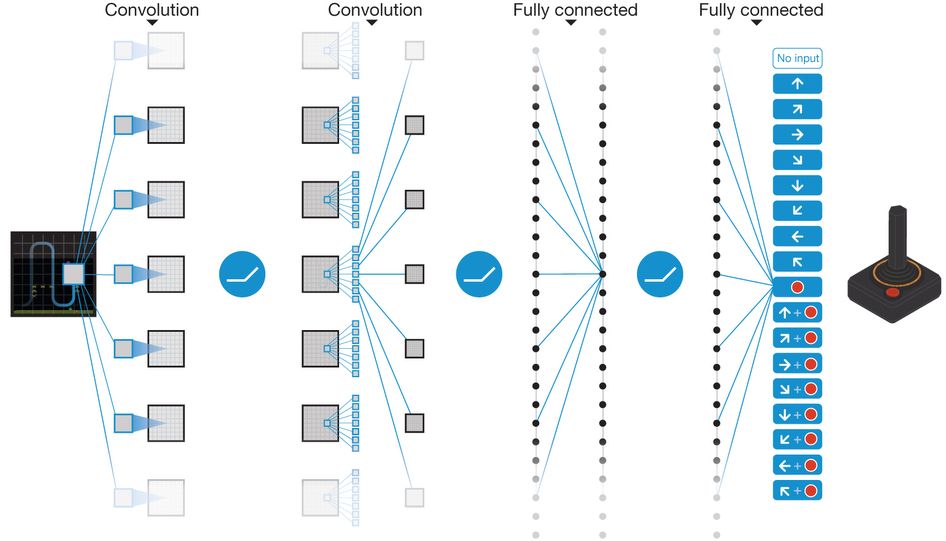
Deep Reinforcement Learning aim at devising decision making policies for autonomous robots by directly interacting with the environment. Possible topics in this area: i) Design and compare state-of-the-art Deep Reinforcement Learning algorithms (DQN, DDPG, Rainbow, etc...) for planning in robotics and multi-robot systems. Possible ideas: a) Path Planning in a multi-robot scenario with a dynamic environment. b) Implementation of novel optimization techniques to improve training phases. c) Test of novel learning algorithms in a multi-platform scenario. Test the solution on available simulation environment such as Gym / ROS + Gazebo and possible porting on the real platform (turtlebot). ii) Verification of DRL systems design and apply verification techniques for DRL methos that can provably guarantee desired behaviors for the system.
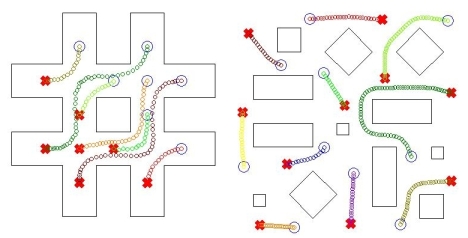
Multi-Robot Coordination
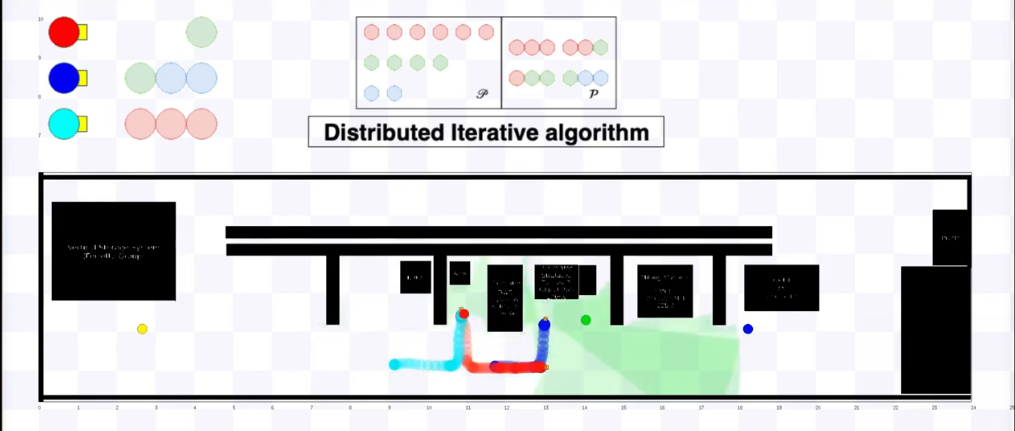
Implement and evaluate coordination approaches for Multi-robot systems. Design coordination approaches for robotic agents involved in indoor logistic operations (e.g., pickup and delivery). Test the solution on a widely used simulation environments (ROS + stage) and possibly on real platforms (turtlebot, RB-KAIROS);
Deep Reinforcement Learning in Complex Environments with Unity3D:
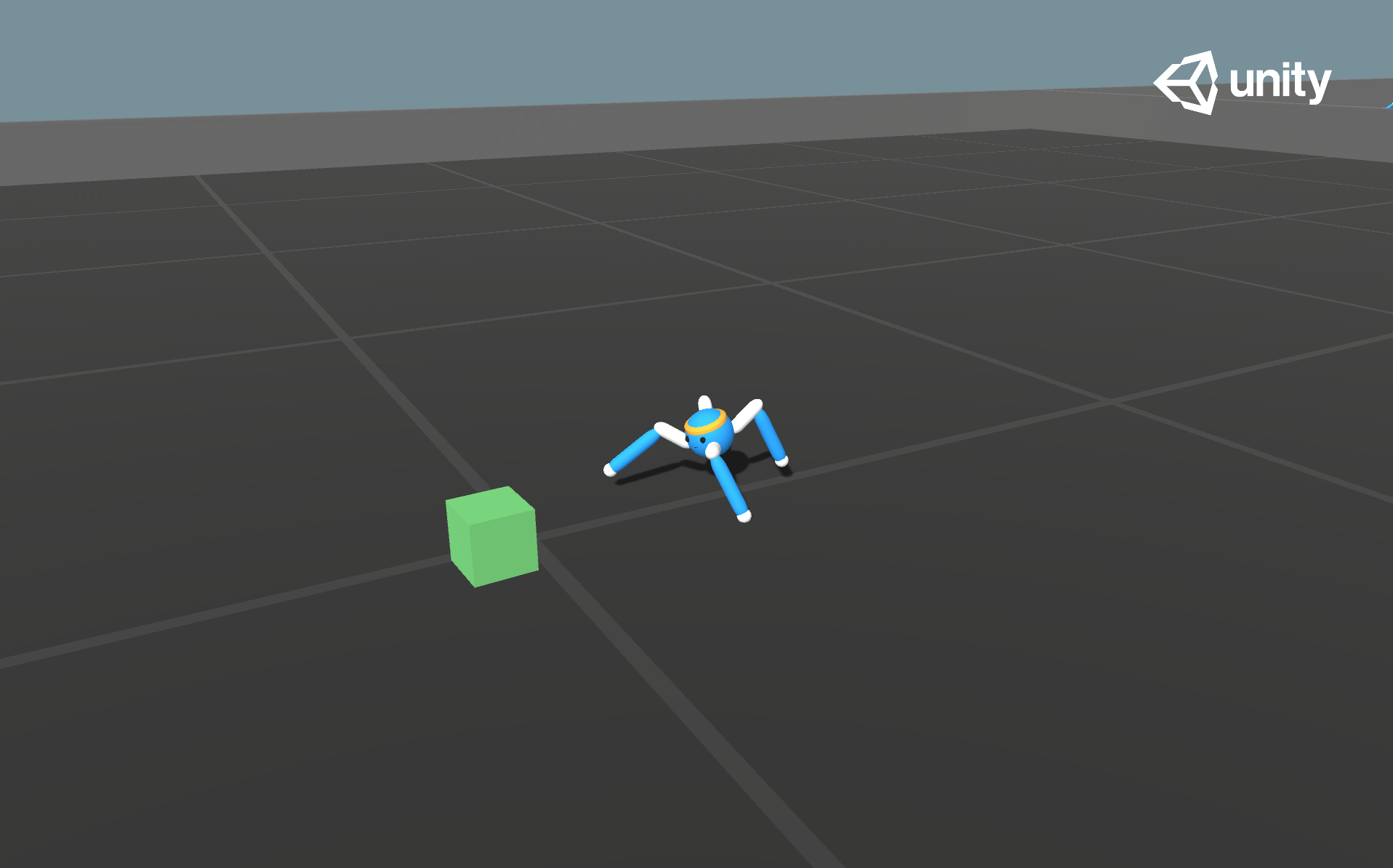
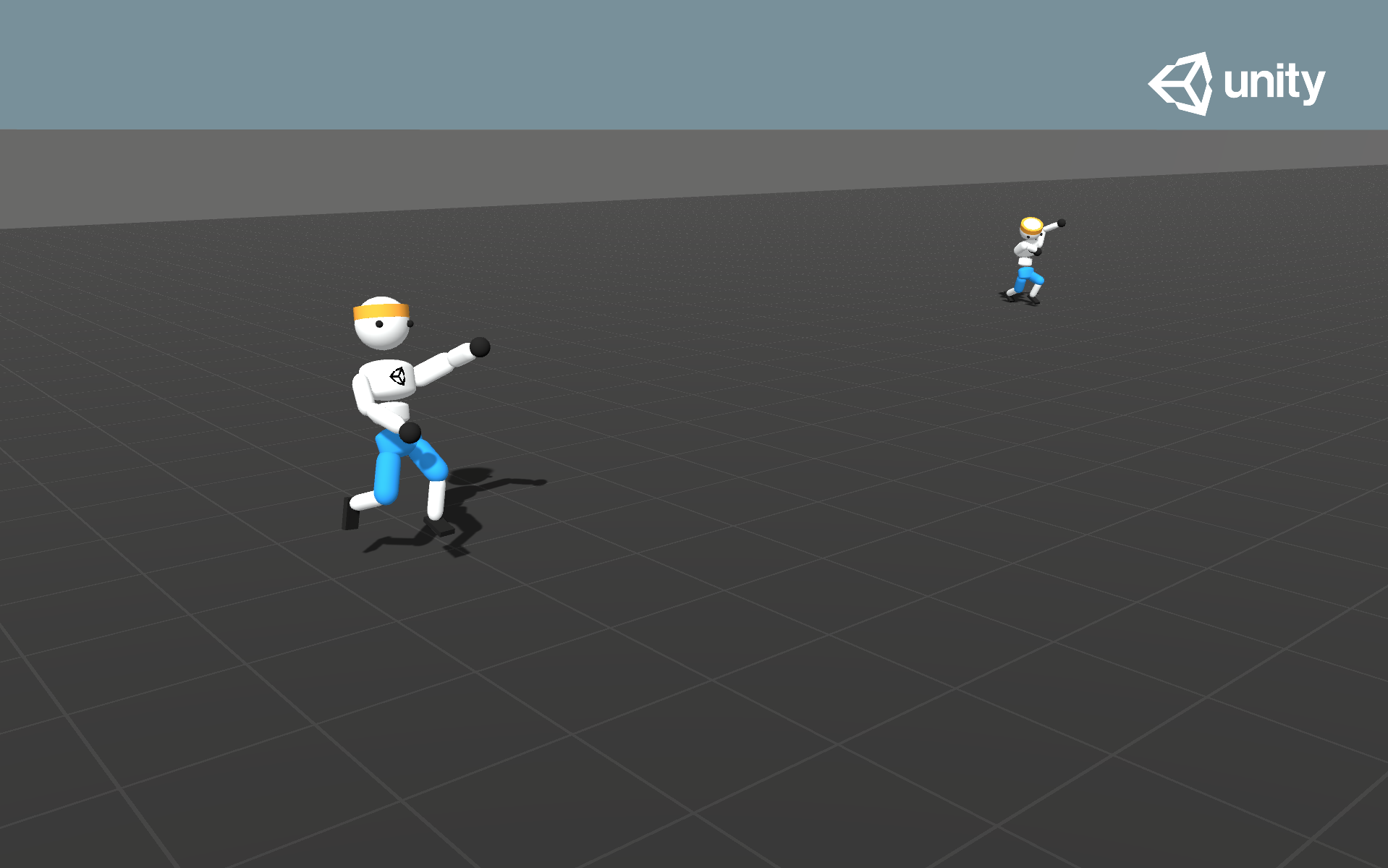
Implement and evaluate Deep Reinforcement Learning algorithms in complex environments designed with the Unity3D engine and the Unity ML-Agents Toolbox (single and multi-agent problems). Possible ideas: 1) Design, compare and, evaluate state of the art algorithms in the environments proposed by unity. 2) Work on safety-critical domains, designing specific environments and algorithms. 3) Compare machine learning techniques with other artificial intelligence algorithms, to evaluate which one performs better on a specific task.